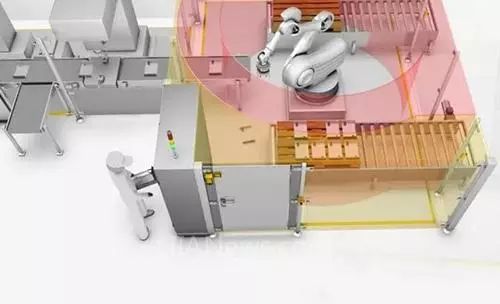
Safety protection space It is well known that industrial robot systems may have a large range of motion space especially when they are dealing with large workpieces. In order to adapt to the maximum motion range of the robot system, the mechanical protection device around the system needs to expand the protection scope to ensure that the robot does not interfere with the surrounding protection when performing tasks. Obviously, a protective structure designed with such a concept may cause extreme waste of resources. If we can apply a reasonable exercise limit to meet operational needs, we can not only effectively improve the utilization rate, but also increase the safety barrier for operators. Industrial robots have a wide range of motion Limited space establishment The limited space of the robot system is mainly established based on the surrounding mechanical protection. The space design for mechanical protection after considering the position and layout of the robot and assessing the danger in the protective space in advance is a comparative process. In the design process, in addition to considering the robot itself, factors such as the movement of the end effector, the fixture, and the workpiece must be taken into consideration. The limited space is matched with the operating space as much as possible to maximize the utilization. Create a limited space for robots Ways to limit movement Limiting the movement of robots is mainly divided into two categories: mechanical and non-mechanical. â– Mechanical hard limit Mechanical hard limits are used to physically constrain the robot from exceeding a specified limit. Since this type of limit will physically contact the robot, special attention must be paid to it: With such a limit, it should be ensured that there will be no physical deformation at the post-collision limit. High-strength fence as a hard limit â– Safety limit of axis and space This is a non-mechanical soft limit, built-in software to determine the robot's limit of motion. Axis limit can constrain the trajectory of the robot; space limit can determine the geometry of the exclusive area. Since this type of limit is set by the software, the authority to modify the parameters should also be strictly protected by the password. Security boundary settings in the software â– External limit device with sensor Another non-mechanical limit is the use of external sensors, such as safe proximity switches, non-contact coded switches, or even virtual screens of safety light curtains, when these external sensors receive an over-limit logic response , Actively activate the robot's safe stop signal. The above two non-mechanical limit devices, due to the principle of control through the logic system, need to additionally consider the robot's stop response distance. Use sensors to set up a virtual barrier ShenZhen Antenk Electronics Co,Ltd , https://www.antenkwire.com