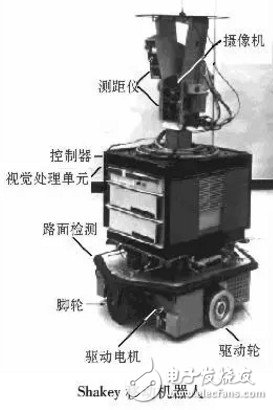
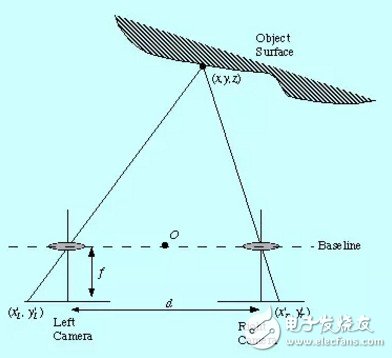
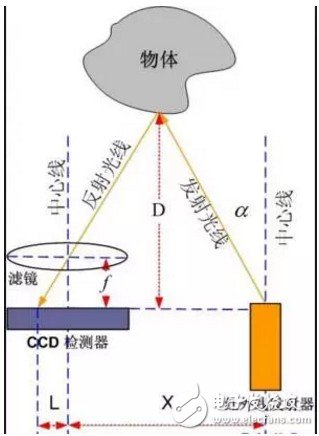
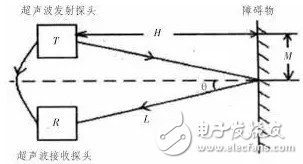
Mobile robots are an important research field for robots, and people have begun research on mobile robots very early. The world's first truly mobile robot was developed by Stanford Research Institute's (SRI) Artificial Intelligence Center from 1966 to 1972. It is called Shakey. It is equipped with a TV camera, a triangometer, a collision sensor, and a drive. The motor and encoder are controlled by two computers via a wireless communication system for simple autonomous navigation. Shakey's development process also gave birth to two classic navigation algorithms: the A* search algorithm and the visibility graph method. Although Shakey can only solve simple perception, motion planning and control problems, it was the most successful research platform for applying AI to robots at the time. It confirmed many serious ones that are usually in the field of artificial intelligence (AI). Scientific conclusions. Since the end of the 1970s, with the development of computer applications and sensing technology, as well as the continuous introduction of new robot navigation algorithms, mobile robot research has begun to enter the fast lane. An important sign of mobile robot intelligence is autonomous navigation, and there is a basic requirement for robot autonomous navigation - obstacle avoidance. Let us take a look at the obstacle avoidance of mobile robots. Obstacle avoidance refers to the mobile robot according to the state information of the obstacles collected. When the static and dynamic objects that impede its passage are sensed by the sensors during the walking process, the mobile robot performs according to a certain method. Effectively avoid obstacles and finally reach the target point. The necessary condition for obstacle avoidance and navigation is environmental awareness. In an unknown or partially unknown environment, obstacle avoidance needs to obtain information about the surrounding environment through sensors, including the size, shape and position of obstacles. Therefore, sensor technology avoids mobile robots. The barrier plays a very important role. Sensors for obstacle avoidance mainly include ultrasonic sensors, visual sensors, infrared sensors, and laser sensors. Commonly used sensors for mobile robots to avoid obstacles Laser sensor The laser ranging sensor uses a laser to measure parameters such as the distance to the object to be measured or the displacement of the object to be measured. The more commonly used ranging method is to emit a pulse laser with a very short duration by a pulsed laser. After passing the distance to be measured, it will hit the target to be measured, and the echo will return and be received by the photodetector. According to the interval between the main wave signal and the echo signal, that is, the round trip time between the laser pulse and the target to be measured, the distance of the target to be measured can be calculated. Due to the fast speed of light, the beam round-trip time is extremely short when measuring small distances. Therefore, this method is not suitable for measurement (sub-millimeter) distances. Generally, if the accuracy is very high, trigonometry, phase method, etc. are commonly used. Method measurement. 2. Vision sensor The advantage of the visual sensor is that it has a wide detection range and rich information. In practical applications, multiple visual sensors are often used or used together with other sensors. The shape, distance, speed and other information of the object can be obtained by a certain algorithm. Or use a sequence image of a camera to calculate the distance and speed of the target. The SSD algorithm can also be used to calculate the relative displacement of the robot and the target based on the motion image of a lens. However, in image processing, image processing methods such as edge sharpening and feature extraction have large computational complexity, poor real-time performance, and high requirements on the processor. Moreover, the visual distance measurement method cannot detect the presence of transparent obstacles such as glass, and is also affected by the intensity of the field of view and the influence of smoke. 3. Infrared sensor Most infrared sensor ranging are based on triangulation principles. The infrared emitter emits an infrared beam at a certain angle, and when it encounters an object, the beam is reflected back as shown. After the reflected infrared light is detected by the CCD detector, an offset value L is obtained. Using the triangular relationship, after knowing the emission angle α, the offset distance L, the center moment X, and the focal length f of the filter, the sensor The distance D to the object can be calculated from the geometric relationship. The advantage of the infrared sensor is that it is not affected by visible light, and can be measured during day and night. The angle sensitivity is high, the structure is simple, and the price is cheap. It can quickly sense the existence of the object, but the measurement is greatly affected by the environment, the color, direction and surroundings of the object. The light can cause measurement errors and the measurement is not accurate enough. 4. Ultrasonic sensor The principle of detecting the distance of the ultrasonic wave sensor is to measure the time difference between the ultrasonic wave and the detected ultrasonic wave, and calculate the distance of the object according to the sound speed. Since the speed of ultrasonic waves in air is related to temperature and humidity, changes in temperature and humidity and other factors need to be taken into account in more accurate measurements. Ultrasonic sensors generally have a short working distance, and the common effective detection distance is between 5-10 m, but there is a minimum detection dead zone, generally in the tens of millimeters. Due to the low cost of the ultrasonic sensor, the implementation method is simple and the technology is mature, and it is a commonly used sensor in mobile robots.
Transparent LED display screen
Transparent Led display is a creative design and upgrade version of Outdoor Led Display screens. It is made by DIP Led strip.
products have features of light weight, energy-saving, high transparency, fast installation and easy maintenance. With advanced and top level of led diode , Priva Led's Outdoor transparent LED Display have low power consumption and high brightness. In this ways, It is very stable and durable during lifetime.
For better understanding Led curtain display main advantages,
High Water-Proof grade applied with IP65 water-proof standard, make your screen working perfectly without problems even in heavy rain.
Light-weight cabinet The cabinet is about 5-8 KG per square meter, 60% less weight compared with traditional tile and have greatly reduce the load bearing pressure of the structures.
High transparency rate Louver design, make the transparency rate up to 72%, and this design greatly satisfied people`s curiosity to see outside from inside.
High brightness8000nits for P25, could be used absolutely for outdoor under strong sunshine.
Fast & easy installation No need steel structure, Solid and simple assemble style, make installation and maintenance quick and easy. It stands firmly even in big wind.
Installation Steps
Installation Steps
1 Fitting the steel structure: fitting it on the wall firmly
2 Attach the U-Tile frame to the structure firmly
3Lock the frame on the structure by screws
4Hanging the upper right hooks of the cabinet to the card slot of the right U-tile Frame.
5
Buckle the left position pins of the cabinet to the location holes of the left side of the U-tile frame
6 Aim at the screw holes for the front service installation, fitting 6 screws on the U-tile frame through the cabinet from the front.
(This is a procedure of front service, this cabinet support also available for back maintenance)
7 Then finished installation for one cabinet. The same as the next cabinet.
8 Cable Connection.
Connect the male-plug (with cable) of the next cabinet to the female-plug of its upper cabinet firmly.
9 Using the same mode to finish the rest connection (five-pins cable), then the installation work for a complete LED display is finished.
After-sale maintenance
1 The cabinet support single trip maintenance. If there any bad LED lamp or damage on single strip, you can remove the strip separately without take out the cabinet and control box.
2, Cabinet support front & back installation and maintenance. If there any problem on single cabinet, you can remove the cabinet from the front & back of the screen.
3 ,If there damages on the control box, you need remove the cabinet and open the cover of the power supply box to do repair & exchange work.
Cabinet size:
Package: Wooden case 1 for 10 led strip curtain cabinets.
Package size:
This outdoor LED Strip curtain display series product are widely used for building facade, behind of glass wall, in front of glass wall, led billboard& signs and on top of building.
Welcome to visit our factory in Nansha Guangzhou China. Please contact us for any questions or inquiries!
Led curtain display Parameter
Model number
Pixel pitch
Pixel configuration
Size of block module
Resolution of module
Density
Cabinet material
Size of cabinet(l*h*t)
Weight of cabinet
Driving method
Best viewing angle
Max power consumption
Colors
Gray scale
Color temperature
Control method
Driving device
Frame frequency
Refresh frequency
Brightness
Working voltage
Working temperature
Out-of control point
Brightness Control
IP grade
Mtbf
Transparency
Led Curtain Display,Outdoor Led Curtain For Building,Led Curtain Wall Display,Led Strip Curtain Shenzhen Priva Tech Co., Ltd. , https://www.privaled.com